17758013020 Chen Chen
-
-
-
17816169069 Jinglin Jian
-
17758013020 Chen Chen
17816169069 Jinglin Jian


Yong Zhu is the Andrew Adams Distinguished Professor in the Department of Mechanical and Aerospace Engineering, with affiliated appointments in Materials Science and Engineering, Biomedical Engineering, and Electrical and Computer Engineering, at North Carolina State University. He received his BS degree from the University of Science and Technology of China (Hefei, China) and his MS and PhD degrees from Northwestern University (Evanston, IL, USA). He conducted his postdoctoral training at the University of Texas at Austin before joining the faculty of North Carolina State University in 2007. His group conducts research at the intersection of mechanics of materials and micro/nano-engineering, including nanomaterial-enabled flexible and stretchable electronics. His work has been recognized with a number of honors and awards including James R. Rice Medal from the Society of Engineering Science, Friedrich Wilhelm Bessel Research Award from the Alexander von Humboldt Foundation, ASME Gustus L. Larson Memorial Award and Sia Nemat-Nasser Early Career Award, and Best Wearable Material/Component Development Award at IDTechEx Wearable USA.
Thermal Actuation for Soft Robotics
Shuang Wu*, Yong Zhu*
* Department of Mechanical and Aerospace Engineering, North Carolina State University, Raleigh, North Carolina, USA (yzhu7@ncsu.edu)
Abstract
Soft robots have received extensive interests recently. Different actuation methods have been exploited based on pressure, heat, electrical field, magnetic field, and chemical potential, etc. No actuation method has yet emerged as the dominant method. Trade-offs typically exist in force, speed, displacement, and requirement for auxiliary equipment. Thermal actuation has drawn much attention due to programmable operation, lightweight, low actuation voltage, no need of electrolyte, and potential for untethered operation (e.g., using wireless charging). However, a major limitation is the relatively slow actuation speed.
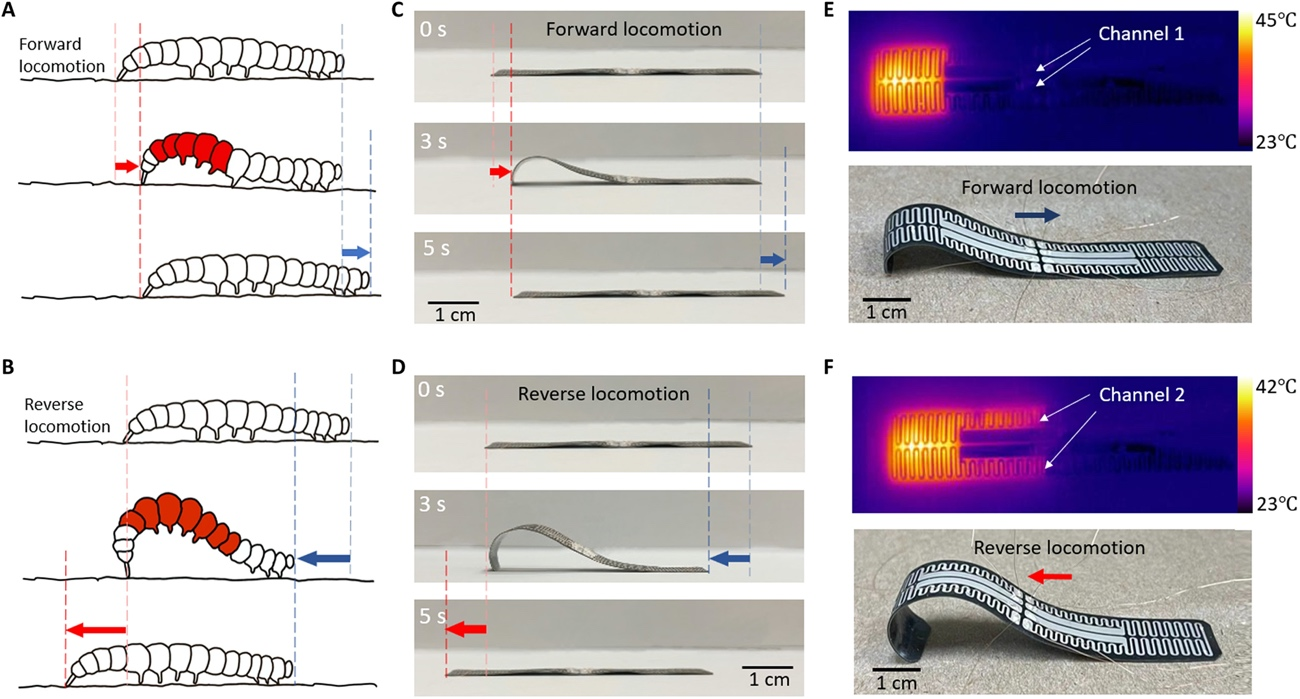
Fig. 1. Bioinspired crawling motions. (A) Schematics of the forward locomotion of a caterpillar. (B) Schematics of the reverse locomotion of a caterpillar. (C) Snapshots of the crawling robot in one cycle of actuation for reverse locomotion. (D) Snapshots of the crawling robot in one cycle of actuation for forward locomotion. (E) infrared image of the crawling robot with 0.05-A current injected in channel 1 and the tilted view of the crawling robot. (F) Infrared image of the crawling robot with 30-mA current injected in channel 2 and the corresponding tilted view of the crawling robot.
In this talk, I will present our recent efforts in exploring thermal actuation for novel capabilities while overcoming its limitation towards soft robotics applications. First, I will talk about a caterpillar-inspired, energy-efficient crawling robot with multiple crawling modes, enabled by joule heating of a patterned soft heater consisting of silver nanowire (AgNW) networks in a liquid crystal elastomer (LCE)–based thermal bimorph actuator (Figure 1) [1]. With patterned and distributed heaters and programmable heating, different temperature and hence curvature distribution along the body of the robot are achieved, enabling bidirectional locomotion as a result of the friction competition between the front and rear end with the ground. The thermal bimorph behavior is investigated to predict and optimize the local curvature of the robot under thermal stimuli. The bidirectional actuation modes with the crawling speeds are investigated. The capability of passing through obstacles with limited spacing is demonstrated. The strategy of distributed and programmable heating and actuation with thermal responsive materials offers unprecedented capabilities for smart and multifunctional soft robots.
Second, I will discuss snap-through instability that can lead to significant increase in the actuation speed of a bimorph thermal actuator [2]. The actuator is made of AgNW/elastomer composite. The snap-through instability is enabled by simply applying an offset displacement to part of the actuator structure (Figure 2). The effects of thermal conductivity of the composite, offset displacement, and actuation frequency on the actuator speed are investigated using both experiments and finite element analysis. The actuator yields a bending speed as high as 28.7 cm−1/s, 10 times that without the snap-through instability. A fast crawling robot with locomotion speed of 1.04 body length per second and a biomimetic Venus flytrap were demonstrated to illustrate the promising potential of the fast bimorph thermal actuators for soft robotic applications.
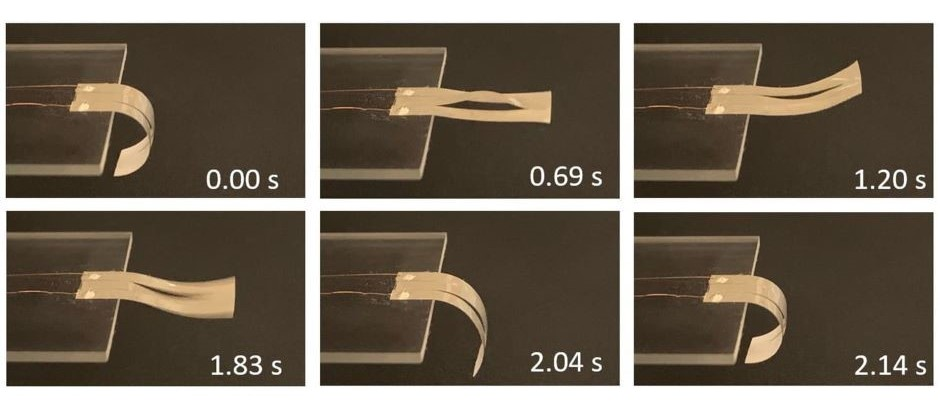
Figure 2: Bending performance of the snap-through enabled bimorph thermal actuator within one actuation cycle.
References
[1] S. Wu, Y. Hong, Y. Zhao, J. Yin, Y. Zhu, Caterpillar-inspired soft crawling robot with distributed programmable thermal actuation. Sci. Adv. 9, adf8014 (2023).
[2] S. Wu, G. L. Baker, J. Yin, Y. Zhu, Fast thermal actuators for soft robotics. Soft Robot. 9, 1031–1039 (2022).
